
Aeg ajalt juhtub, et kui minul jääb aega kitarri harjutada on majapidamine öörahu režiimis ja valjuhääldiga kitarrivõimendi kasutamine võimatu. Tarvis on kitarri heli saada kõrvaklappidesse. Seega on tarvis ehitada võimendi, mis muudab elektrikitarri signaali kõrvaklappides kuuldavaks.
See projekt oleks ka paras sissejuhatus helitehnikasse. Tahan ehitada kõige lihtsama süsteemi, mis ma välja suudan mõelda. Ning ma ei taha kasutada mõnda spetsiaalselt selleks tarbeks loodud integraalskeemi.
Eesmärgiks on ehitada võimendi, mis töötaks ühe 9V toiteallikaga. Olgu selleks siis patarei või võrku ühenduv adapter. Hoiatus ka: Ma ei ole helitehnikaga väga palju kokku puutunud ning aeg selle artikli kirjutamiseks on mõningal määral piiratud. Seega arvesta, et see ei pruugi olla kõige targem ega parem lahendus. Küll aga peaks see enam-vähem toimima.
Kitarr kui allikas
Enne, kui skeemi joonistama asume, tasuks uurida mis on see signaal mida võimendame. Tegemist on helisagedustega. Minul on kasutada kuuekeelne 21 fretiga kitarr, mis mängib noote E2 kuni C♯6. See annab põhisageduste vahemikuks 82 – 1108 Hz(võnget sekundis). See on küll kahjuks ainult pool tõest, sest kitarrikeele võnkumine ei ole füüsikatunnist tuttav siinus-signaal. Kitarrile annab tema iseloomuliku heli kitarrikeelte ja kitarrikere koosvõnkumine. Seega on lisaks põhisagedusele oluline ka ülejäänud sageduspilt, mis konkreetse noodiga kaasas käib. All on ostsilloskoobi pilt C♯6 noodist.
Kui pika aja tagant signaal ennast kordab? See on umbes 900μs ehk umbes 1100 Hz. Kui sa aga vaatad esimest kolmandiku ühest perioodist, näed sa midagi siinuse sarnast. See suure amplituudiga võnke periood on umbes 300μs ehk umbes 3300Hz.
Kuigi sedasi saaksime välja mõelda mingid sageduse piirid, kus võimendi toimima peaks on ohutum võtta arvesse kogu kõrvale tajutav helisagedusvahemik: 20 kuni 20 000 Hz.
Teine asi mida arvestama peab on kitarri väljundtakistus. Väljundtakistus annab mõista kui palju energiat ühest või teisest allikast tulla võib. See näitab, kui palju langeb allika väljundpinge, kui väljundisse mingi koormus panna. Mida väiksem on koormuse takistus, seda suurem on koormus.
Elektrikitarri helipea on sisuliselt magnet mille ümber on keritud mitu tuhat tiiru peenikest traati. Magnet tekitab elektrivälja mida terasest kitarrikeel mõjutab. Kui kitarrikeel võnkuma hakkab moonutab keele liikumine magnetvälja ning ajas muutuv magnetväli tekitab elektrivoolu magneti ümber keritud poolis. Selleks, et aru saada mis on selle elektrisignaali tugevus tutvustan paari mõistet.
Üks mõiste mida signaaliallika iseloomustamiseks kasutatakse on lühisvool. See on vool mida allikas suudab tekitada kui väljundis on lühis. Ehk siis takistus, mis võrdne nulliga. Teisisõnu maksimaalne vool mis allikas tekitada suudab. Mõõteriist mis seda simuleerida üritab on ampermeeter. Oma tagasihoidliku ampermeetriga mõõtsin oma kitarri lühisvooluks 5μA.
Teine mõiste mida signaaliallika iseloomustamiseks kasutatakse on tühispinge. See on pinge mida allikas suudab tekitada kui väljundis ei ole koormust. Ka seda saaks mõõta multimeetriga vahelduvpinge mõõtmise režiimis, kuid saab ka ostsilloskoobiga. All on pilt akordist E-minoor.

Siit on näha, et pinge mis kitarrist välja tuleb on amplituudiga kuni 0,5V päris alguses ning mõni üksik võnge ka üle selle.
Kitarrist seega ei tule väga palju energiat. Kui arvutame pingest ja voolust sisetakistuse saame selle umbes 10kΩ kanti.
Kõrvaklapid kui koormus
Kui kitarr on suure väljundtakistusega allikas, siis kõrvaklapp on väikese sisendtakistusega koormus. Mida väiksem takistus, seda suurem koormus. Ajas muutuvate signaalide korral huvitab meid tihtipeale lisaks tavalisele takistusele ka impedants. Kohe seletan.
Kõrvaklapp on tegelikult tilluke kõlar. See on püsimagnet, mille ümber on vabalt liikuv membraan. Ning membraani külge on keritud peenikesest vasktraadist mähis. Kui mähises on vool hakkab magnetväljas asuvale mähisele mõjuma mehaaniline jõud. Kui mähist läbib vahelduv vool hakkab mähis ja selle küljes olev membraan võnkuma. Kui see võnkumine toimub kusagil vahemikus 20 kuni 20000 Hz ongi tegemist helisagedustega. Loe valjuhääldi kohta täpsemalt wikist.
Tulles nüüd tagasi elektroonika juurde… Kõlar või kõrvaklapp on peale vaadates mähis. Seega on sellel lisaks tavalisele takistusele ka induktiivsus. Induktiivsus kutsub esile nähtust, kus pinge rakendamisel kulub voolu tekkimiseks veidi aega. Induktiivsete koormuste puhul on mõistlik rääkida takistuse asemel impedantsist. Eriti kui koormust toidetakse vahelduvpingega. Impedants ehk näivtakistus annab aimu, millist takistust näeb mingi sagedusega vahelduvsignaal, kui see koormusele rakendada.
All on pilt ühe Eminence kõlaritootja valjuhäädi impedantsi-sageduse(helepunane) karakteristik ja helirõhu taseme-sageduse (tumepunane) karakteristik. Pilt on kopeeritud DELTA PRO-8A andmelehest.

Kui vaatad seda heleroosat graafikut vasakult paremale näed, et esimeses kolmandikus on üks tipp. Seda nimetatakse põhiresonantsisageduseks. Kõlari nimitakistuseks on näivtakistuse vähim väärtus põhiresonantsisagedusest ülevalpool. Näites kasutatud kõlari puhul on see siis umbes 8Ω.
See on oluline teadmine väljundastme projekteerimisel. Kõrvaklappide nimitakistused varieeruvad tavaliselt vahemikus 16-36Ω, aga leidub ka igasuguseid teisi nominaale.
Eelvõimendi
Nagu seletasime ei ole kitarr just väga suure võimsusega allikas. Järelikult on tarvis võimendit, mille sisendtakistus on suur. Kõige lihtsam suure sisentakistusega võimendi on mitteinverteeriv võimendi opaka baasil.

Pingevõimendus pannakse paika takistite R1 ja R2 omavahelise suhtega. Need moodustavad pingejaguri ning söödavad mingi osa väljundist tagasi sisendisse. Mäletad ehk, et kui opvõimendi “+” sisend on suurem kui “-” sisend siis läheb väljund “kõrgeks”.
Võta nüüd aga arvesse tagasisideahel. Kui läbi selle ahela, läbi selle pingejaguri, osa signaalist “-” sisendile anda on väljundpinge väärtus võrdne “+” sisendi pinge korda pingevõimendustegur. Pingevõimendustegur on suurus mis näitab kui mitu korda on väljundpinge suurem sisendpingest. Selle arvutamiseks jagatakse võimendi väljundpinge sisendpingega. Paneme sellele nimeks Kv.
Mängime läbi olukorra, kus “+” sisendil on pinge 0,5V. Väljundi pinge kasvab hetkega nii suureks, et ka “-” sisendil oleks pinge 0,5V. Siis on sisendid võrdsed ja väljundil ei ole enam põhjust kasvada (pinge “+” sisendil ei ole suurem kui pinge “-” sisendil).
Näiteks tahame kümne kordset pingevõimendust. Tarvis oleks välja uurida milline peab olema takistite R1 ja R2 suhe selleks, et “-” sisendis oleks 0,5V, kui väljundis on 5V.
Tegemist oli ju pingejaguriga. See on tuttav.
![]()
Samuti on “-” sisendi pinge võrdne “+” sisendi pingega ning seega

Läheb veidi matemaatiliseks, aga kannata ära. See on(vähemalt minu arust) parim viis sisuliselt aru saada kust kohast tuleb tööriist selle võimendi tagasiside takistite valimiseks.
Me tahame suurused V”-” ja Vvälja asendada suurusega Kv. Selleks tuleb pingejaguri valemit veidi ümber seada.

Lülitame Kv võrrandisse.
![]()
Tore oleks siit avaldada üks takisti väärtustest. Näiteks R1. See annaks võimaluse välja mõelda mõne suvalise R2-e ning soovitud KV jaoks vajaliku R1 arvutada. Kirjutame võrrandi lahti nii
![]()
![]()
Siit on näha, et kui tahame võimendust 10 korda ning valime R2 näiteks 1kΩ, siis (10-1)*9=9kΩ.
Simuleerisin võimendi skeemi LTSpice-is.

See oli võimendi töö põhimõtte demonstreerimiseks. Nüüd täiendame skeemi nii, et see sobiks kasutada ühepolaarse toitega.

Et me ei saa väljundis minna negatiivseks, tuleb sisendile lisada nihkepinge. Kaval on selleks nihkepingeks võtta pool toitepinget. Sedasi on võimendi väljundil maksimaalne liikumisruum mõlemas suunas. Lisame nihkepinge R4 ja R5 koosneva pingejaguri abil. Selleks, et sisendsignaal pingejagurit väga ei mõjutaks on pingejaguril toeks kondensaator. Samuti tasub pingejaguri ja sisendi vahele panna suur takisti, näiteks 1M. Vastasel juhul langeb võimendi sisendtakistus.
Selleks, et tekitatud nihkepinge ei voolaks tagasi kitarri, tuleb alalisvoolu komponent kondensaatoriga sisendist lahti sidestada. Tuleta meelde, et alalisvoolu jaoks on kondensaator tühis. Ainult vahelduvsignaal pääseb läbi.
Et see asi toimiks tuleb alalisvoolule ka tagasiside poolel tõke ehitada. Selleks on C1. Kui sa annad sisendile pinge 4,5V (pool toitepingest) ning su võimendustegur on 10, siis üritab väljund hüpata 45V peale. Meie aga ei taha võimendada alalisvoolukomponenti. Me tahame, et alalisvoolu jaoks ei oleks meil mitte võimendi, vaid pingejärgur. Me tahame, et alalispinge jaoks oleks võimendustegur 1. Et väljundi alalispinge komponent oleks sama suur, kui sisendsignaali alalispinge komponent. Kui vaadata tagasisideahelat alalisvoolu vaatepunktist, siis C1 asemel on tühis ning C1 koos R2-ga näivad, kui lõpmatult suur on takistus. Mis aga juhtub pingevõimendusteguriga, kui R2 on lõpmatult suur?
![]()
Just! KV = 1. All on näha, milline on ülaloleva skeemi väljund, kui võimendustegur on 10 ja sisendsignaali amplituut on 0,1V.

Lõppvõimendi
Sisuliselt, kui sul õnnestub leida opakas, mille väljund lubab piisavalt suurt voolu võid lõppvõimendi osa ära jätta. Enamustel võimenditel on väljundvool piiratud selleks, et kaitsta seadet ülekoormuse, ülekuumenemise ja purunemise eest.
Millist voolu võimendi väljund välja peab andma? Meie koormuseks saavad kõrvaklapid. Ehitame ühe kanaliga võimendi(monovõimendi), aga et ikkagi saada heli mõlemasse kõrvaklappi ühendame kõrvaklappide valjuhääldid paralleelselt. Arvestame siis, et 16Ω klapid on vähima nimitakistusega klapid, mis meie väljundisse satuvad. Kaks 16Ω koormust paralleelis annab näivtakistuseks 8Ω. Võimendi väljundi maksimum on 4,5V. Oomi seadusest lähtub seega, et maksimaalne vool on 0,56A.
Kui leiad sellist voolu välja andva opaka, siis saad ilma lõppastmeta hakkama. Küll aga pead ära võtma alalisvoolu komponendi väljundsignaalist, täpselt samuti nagu sisendi korral. Sa ei taha, et su kõlaris alalisvool voolaks ja kõrvaklapi membraanis nihke tekitaks.
Mina otsustasin lõppastme ise ehitada. Skeemi leidsin L.Abo raamatust “Raadiolülitused” ning allolev koopia pärineb sealt.

See on ühepolaarse toitega ning et väljundis on alalispinget lahti sidestav kondensaator on selle väljund ka lühisekindel.
See toimin nii. Ülemine transistor on NPN tüüpi, alumine PNP tüüpi. Ülemine transistor tekitab ülemise poolperioodi signaalist. Alumine tekitab alumise poolperioodi. Oletame, et see on ühendatud meie eelvõimendi väljundisse ning eelvõimendi üritab hoida pinget 4,5V.
0V-st kõrgem pinge avab VT1-he ning pinge kahe transistori vahel hakkab kasvama. Aga kui pinge kahe transistori vahel hakkab lähenema 3,8V-le hakkab transistor ennast sulgema. Mäletad ehk, et NPN transistori avamiseks pidi transistori baasi suunas elektrivool olema. Mäletad ehk sedagi, et pingelang, mis jäi baasi ja emitteri vahele oli 0,7V. Aga aega mööda kasvab pinge emitterite vahel siiski 4,5V-ni, ning stabiliseerub seal. VT1 baas-emitter pinge on null ning see on välja lülitatud. Samuti on VT2 emitter-baas pinge null ning see on samuti suletud.
Sellel skeemil on üks fundamentaalne probleem. Kui sa nüüd tahad siia mingi signaali sisse anda ei hakka väljund muutuma(vähemalt mitte piisava kiirusega) enne kui sisend kasvab(või kahaneb) umbes 0,5V – 0,7V. See tuleneb baas-emitter päripingelangust. Vaata allolevat graafikut. Tulemuseks on moonutatud signaal.

Selle probleemi lahendamiseks tuleb transistorid eelpingestada. Seletan alloleva skeemi abil.

Me tahame tekitada olukorra, kus väljund hakkaks muutuma samal momendil, kui sisendipinge. Mitte alles siis, kui sisend on väljundist 0,7V suuremaks kasvanud. Selleks tuleb appi võtta eelpingestamine. Me anname transistori paisule sellise pinge, et iga pinge kasv tagaks transistori avanemise. 0,7V on NPN ränitransistori baas-emitter pinge. 0,7V on samuti ränitransistori päripingelang. Seega…
Sama töötab ka alumise poolperioodi jaoks. Alumise, PNP transistori jaoks on avanemiseks vaja, et baasipinge oleks 0,7V madalam kui emitterpinge (kahe transistori kokkupuutepunkt). Päripingestatud diood tagab, et alumise transistori paisul on alati 0,7V madalam pinge kui sisendil. Seega kutsub iga sisendi pinge langemine kaasa alumise transistori avanemist.
Pane tähele, et transistorid juhivad mõnevõrra rohkem ainult senikaua kuni väljund saavutab sisendpingega enam-vähem sama väärtuse.
Skeem

Selline sai võimendi, kui põhimõtteskeemid kokku panna ja komponentidele nominaalid anda. Oluliseim lisa on takisti R8. Mis on selle mõte? Kohe seletan. Aga enne räägin probleemist, mis tekib, kui seda takistit ei ole.
Üldiselt oli see skeem erakordne selle poolest, et see läks esimesel katsel käima. Ainus asi, mis edu ära rikkus oli mingi krabin. Moonutus. Pärast paari õhtut leidsin ostsilloskoobilt järgmise:

See muutus nähtavaks alles siis, kui andsin sisendisse stabiilse siinus-signaali, mitte kitarri tekitatud laine. Et aru saada kuskohast see tuleb tasub vaadata opvõimendi sisse.

Lähme nüüd praktiliseks. Meie võimendi töötab ümber ühe pingepunkti. Selleks on pool toitepingest, ehk 4,5V. Selleks, et hoida võimendi väljundis 4,5V tuleb väljundil veidi voolu kogu aeg välja anda. See vool voolab aeglaselt ära läbi D2 ja R2. Kui me tahame väljundi pinget tõsta peame me avama opvõimendi väljundi ülemist transistori ning väljundisse rohkem elektrivoolu andma.
Mis aga juhtub, kui tahame tekitada 4,5 voldist madalamat signaali? Siis hakkame ülemist transistori sulgema ja väljundisse minevat voolu vähendama. Mingi hetk aga saabub olukord, kus väljundi pinge enam ei vähene kuigi ülemine transistor on juba täiesti suletud. See tuleb sellest, et R1 ja R2 moodustavad pingejaguri. Sellel momendil peab opvõimendi väljundi transistor hoopis voolu neelama hakkama.
See väljundi voolu suuna muutus ongi see, mida ostsilloskoobi pildilt näha saab. Vaata uuesti opaka sisemist skeemi. Väljundtransistore juhitakse selle transistoriga, mille ma sinise ringiga tähistasin. See transistor lülitab püsivooluallikast tulevat voolu ning muudab sellega pinget väljundtransistoride baasidel. Kui meil on vaja, et võimendi väljund on kõrge siis juhib sinise rõngaga tähistatud transistor veidi vähem ning kõrgem pinge baasil toob esile kõrgema pinge (suurema voolu) väljundis. Kui nüüd aga on vaja, et võimendi hakkaks voolu neelama, peab sinise rõngaga tähistatud transistor avanema niipalju, et alumine väljundtransistor juhtima hakkaks. See aga võtab veidi aega. Seda aega pikendab veelgi rohelise rõngaga tähistatud transistor. Tulemuseks ongi see tilluke periood, mille jooksul signaal ei muutu vajaliku kiirusega ja on hiljem sunnitud hüppe tegema.
Üks väga sirgjooneline lahendus sellele probleemile oleks tagada, et opakas ei peaks ennast kunagi ümber lülitama voolu allikast voolu neeluks. Selle jaoks ongi väljundis R8. Kui opakal on nüüd tarvis väljundpinget vähendada ei pea ta alumist transistori avama. R8 kutsub esile olukorra, kus võimendi peab ka 4,5-st voldist madalama pinge tekitamiseks siiski ikka veel voolu välja andma. Sa saad arvutada kuskohast tekib see koht, kus võimendi režiimi tahab muutma hakata. Ilma R8-ta oleks see kusagil 4,5V ümbruses. Koos R8 on see umbes 3V, sest meie R1 ja R2-st koosneval pingejaguril on nüüd üks täiendav takistus alumise õlaga paralleelis.
Teine asi, mis võib olla huvitav. Ma valisin eelvõimendi võimenduseks tagasihoidliku 2 korda. Katsed näitasid, et sedasi saab piisavalt valju võimendi. Küll aga võid püsitakisti potentsiomeetriga asendada ning sedasi võimenduse (helitugevuse) kontrolli alla võtta. Soovitan kasutada logaritmilist potentsiomeetrit.
Praktiline

Ma kasutasin selle skeemi arendamiseks suures mahus simulatsiooniprogrammi LTSpice. See on ka põhjus, miks asi esimese korraga enam-vähem tööle läks. Ma simuleerisin terve skeemi varemalt ära. Ainus põhjus, miks see üleminekumoonutus läbi lipsas oli see, et simulatsioonis kasutasin võimendit LT1366, millel on sisemised skeemid selle moonutuse vältimiseks.
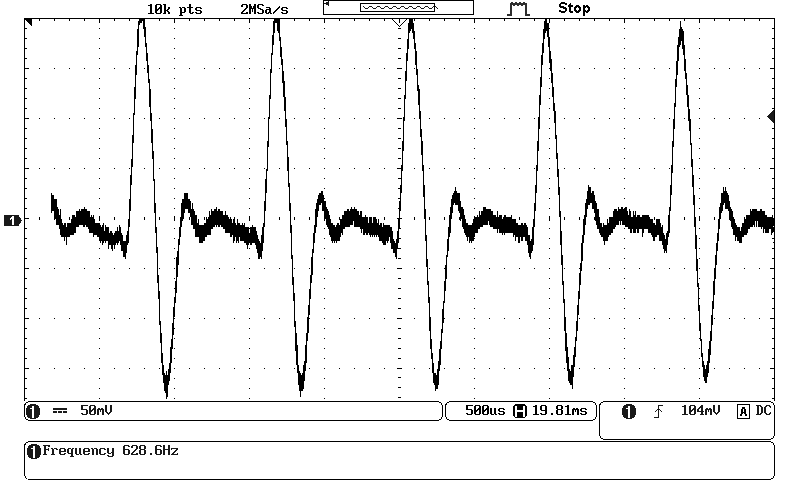
Asi mis ma veel õppisin käib toiteadapterite kohta. Nimelt võib olla, et need mürisevad. All on ostsilloskoobi pilt ühest odavast 9V adapterist, mis ma Oomipoest rabasin.

Kui kindla peale kohe esimese korraga toimivat lahendust tahad saada, siis mine haara muusikapoest spetsiaalselt kitarrieffektidele mõeldud toiteadapter. Mina leidsin kodust 12 V toiteadapteri, mille väljundpinges ebameeldivat müra ei olnud. Ning jah. See skeem töötab kas 12 voldise toitega
Pakendasin kogu kupatuse lihtsasse plastkarpi ja tulemuseks oli üks viimistletumaid projekte, mis ma valmis olen saanud.

Viimased mõtted
Kolm tööriista aitasid mind kõvasti edasi edasi selle projekti käigus.
- LTSpice- See on vabavaraline elektroonikasimulaator integraalskeemide tootjalt Linear Technologies. Lae see alla ja õpi seda kasutama. Sellel on suur raamatukogu levinud integraalskeemidega (ennekõike LT omad) ning et seda kasutatakse elektroonikadisainis laialdaselt on juhendmaterjali piisavalt. Simuleeri kõik oma skeemid läbi nii täpselt, kui vähegi võimalik ja sa suurendad oluliselt tõenäosust, et asjad hakkavad tööle. Kuigi LT osteti hiljuti Analog Devices-i poolt on täna programm veel kodulehel alles. Ma ei garanteeri, et see link tulevikus ka töötab:
http://www.analog.com/en/design-center/design-tools-and-calculators/ltspice-simulator.html - Online signaaligeneraator- Kindlasti on neid palju, aga see mis mina selle projekti käigus kasutamiseks leidsin asub aadressil http://www.szynalski.com/tone-generator/. See teeb siinust, nelinurka, kolmnurka ja saehammast ning see kasutab selleks sinu arvuti helikaarti. Sagedused on vahemikus 20-20000Hz. Ainus riistvara, mida sa vajad on 3,5 mm kõrvaklapipistikut koos mõne juhtmega.
- “Raadiolülitused” Lembit Abo – Eestikeelne elektroonikapiibel. Eriti kui helitehnika on su esimene huvi. See katab kõik elementaarsed analoog- ja digitaallülitused. See käib läbi võimendid, toitelülitused, kõlariehituse(ka kastiga seotud arvutused ja näpunäited) ning see kasutab eestikeelset oskussõnavara, mis interneti ja ingliskeelse õppematerjali ajastul kaduma kipub. https://erb.nlib.ee/?kid=12197270. Neid leiab otsimise peale vanade raamatute kauplustest. Ka guugeldada tasub.